
いきなり、3Dプリンターで模型を作ってみよう⑦ではなくて番外編①です。 決して、3Dモデリングがなかなか進んでいないからということではないのですが。まぁ、順調に艦橋部分のモデリングで躓いているので、ちょっと時間稼ぎということです。
実際、Twitterの方で、3Dプリンターを使う際に軸の太りとかで嵌めあいをどう設定しているんだろうというツイートを見かけました。
もともと、3D出力する際には、ダボ(軸)とダボ穴との嵌めあい公差について検証しなければならなかったので、今回前倒しで検証していくことにしました。
今回、検証するのは、Φ3.0mmの軸と穴との関係、Φ5.0mmの軸と穴との関係、Φ8.0mmの軸と穴との関係です。
各軸と穴とは0.05mmずつ寸法をずらして0.2mmスパンでの嵌めあいの具合を調べてみます。
工学的には、JISの嵌めあい公差にしたがって、調べるべきではありますが、当所の3Dプリンター、Phrozen社の”Sonic mini”ではXY解像度が62.5μmですので、0.07mm程度のバラつきが生じると予想できます。0.1mmピッチだと逆に嵌めあいがかなり緩くなる場合もありそうなので、0.05mmピッチでの嵌めあい具合を検証していくことにしました。








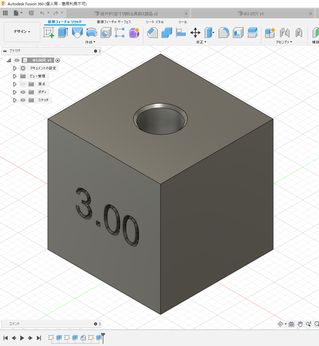


第1弾として、上の図に示すように、Φ2.90、2.95、3.00、3.05、3.10の軸と、Φ2.90、2.95、3.00、3.05、3.10の穴を3Dプリンターで出力して嵌めあい具合を確認します。
さらに今回は、出力姿勢における寸法への影響も検証していきます。下の図では、各寸法の軸を傾斜角度0°(垂直吊り下げ状態)、30°(プラットフォームに対して)、45°に設定しました。

検証は出力後、完全に収縮が収まる2日程度時間をおいて行います。結果は3日後程度の番外編でご報告いたします。
また、順次、Φ5、Φ8の軸及び穴についても出力し、検証します。